


多関節ロボットによる多目的自動研削装置の開発
本研究課題は,株式会社関西技研(石井正人社長)とともに平成11年度独創的研究成果育成課題として科学技術振興事業団に提出し,採択されたものである(2,720万円).本研究室では,多目的自動研削装置の24時間無人運転実証のための支援ならびに切削抵抗の解析と振動抑制の解明,最適な加工条件の具現化を担当した.
研究の背景
産業界では国の経済基盤を支える3K分野の自動化や知能化が重要な課題となっている。
現在、大形鋳鋼部品・鋳物部品の研削作業は、3Kの代表的作業である。保護メガネ、防塵マスク、防熱服など完全装備の上、約5Kg のグラインダーを持ち、ベテラン作業員によって表面研削を行っている。50トンクラスの品物の場合は、1週間程の研削作業日数を必要とし、その作業は想像以上に危険かつ過酷な作業となる。
この分野は若手人材も育ちにくく、技術継承が行われにくいため、鋳鋼・鋳物工場では作業改善が重要な課題である。現場では過酷な研削作業を初め、切断、研磨、バフ仕上げ作業を軽減するため1台の装置でこれらの作業が行えるようにロボット化された多目的自動研削装置の開発が望まれている。
従来、一部研削装置の自動化は進んでいるが、これらの作業機能を併せ持った多目的自動研削装置は研究段階でいまだ実用化されるに至っていない。
もし装置が開発されると、従来、3K作業とされていたグラインダー掛けを大幅に作業軽減できるばかりか、3Kという従来の暗いイメージからシステムオペレータ作業へと職場の雰囲気が画期的に変化し、職場の作業環境が改善され安全対策が向上すると若手人材の雇用促進にも大きく貢献することが期待できる。このような意味から本装置の開発研究は重要である。
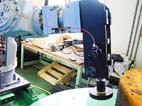
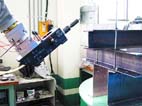
自動研削装置の写真
|
|
|||
|
|
|
|
|
|
|
|||
 |
 |
 |
 |
![]()