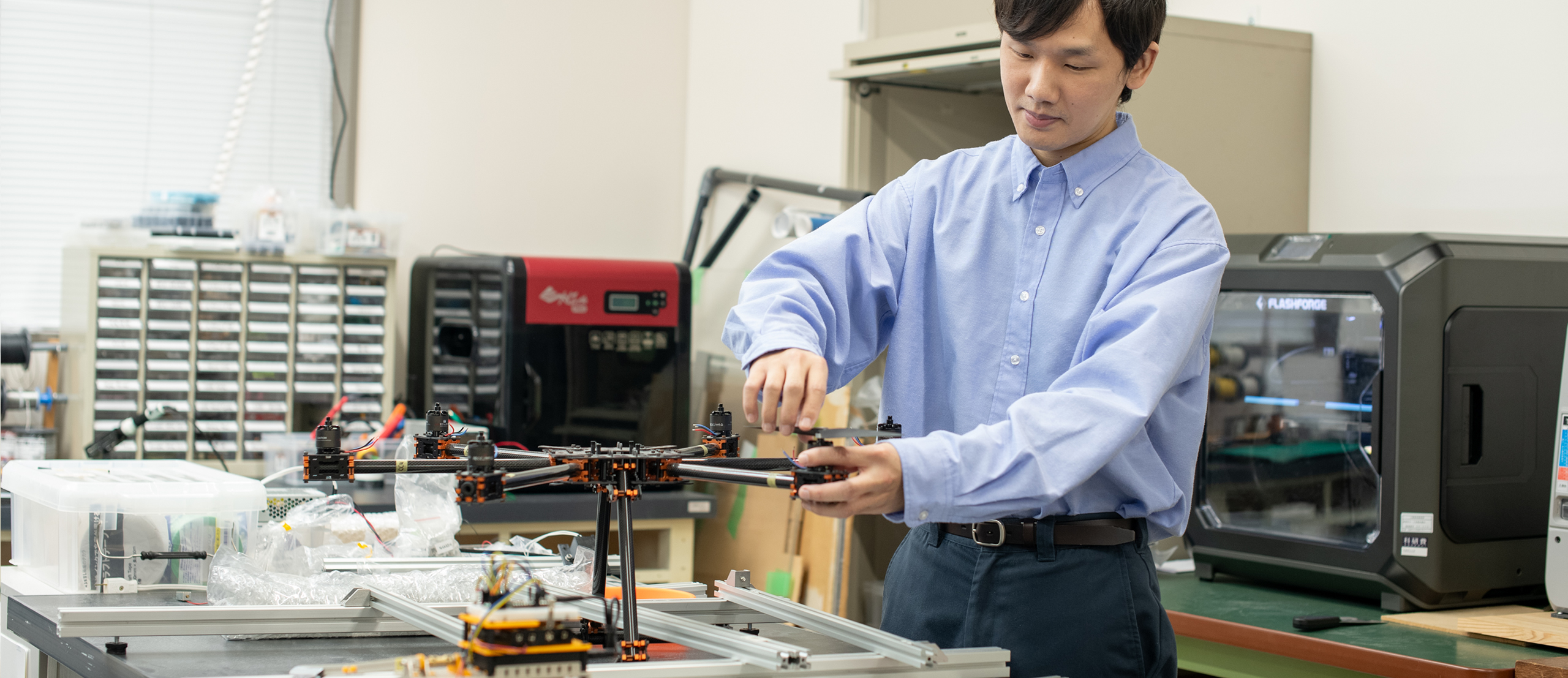
駆動系(モータ+プロペラなど)を余分に備えた冗長ドローンが登場しています。こうしたドローンは高いポテンシャルを持つ一方で、非冗長ドローンと比べて制御設計は複雑化します。そこで、冗長ドローンの性能を引き出しつつ、省エネルギー性など付加価値の高い制御を目指す研究に取り組んでいます。
ドローンの駆動系として用いられるモータの推力-エネルギーモデルを構築し、そのモデルに基づく最適な推力分配器設計を提案しました。この分配器を使用すると、運転状態によっては冗長ドローンの飛行時のエネルギーを小さくすることが可能になるかもしれません。
物流やインフラ点検、災害調査など、さまざまな分野でドローンの活躍が期待されています。そして、積載量や航続時間を増大するために多数のロータを備えた冗長ドローンが登場しています。こうした冗長ドローンは、高い運動性能のポテンシャルを持つ一方で、それを引き出すための制御設計は複雑・高度化します。そこで、ドローンの持つ冗長性を積極的に活用した制御系を設計する方法が求められています。
ドローンに使用される駆動系(モータとプロペラ)を用いて実験を行い、発揮される推力と消費エネルギーの数理モデルを構築しました。このモデルを用いて、ドローンの制御時に必要とされるさまざまな推力のパターンを決定する分配器という機構を設計する方法を提案しました。数値シミュレーションを通して、提案した分配器が運転状態によっては10%以上消費エネルギーを削減できることを示しました。
ドローンに限らず、冗長システムとしてとらえられる製品(ハイブリッド自動車、電気自動車、アクティブ除振台など)は多くあります。本研究の成果は、そうした冗長システム一般に活用できる可能性があります。

| 研究情報 | |
|---|---|
| ジャーナル | Journal of Robotics and Mechatronics |
| タイトル | Design of an Optimal Allocator for Power Consumption Minimization in Hexarotor Drone Control Systems |
| 著者 | Natsuki Kawaguchi, Haruka Maruyama |
| メンバー | 川口夏樹(工、機械工学) |
| URL | https://www.fujipress.jp/jrm/rb/robot003600051255/ |