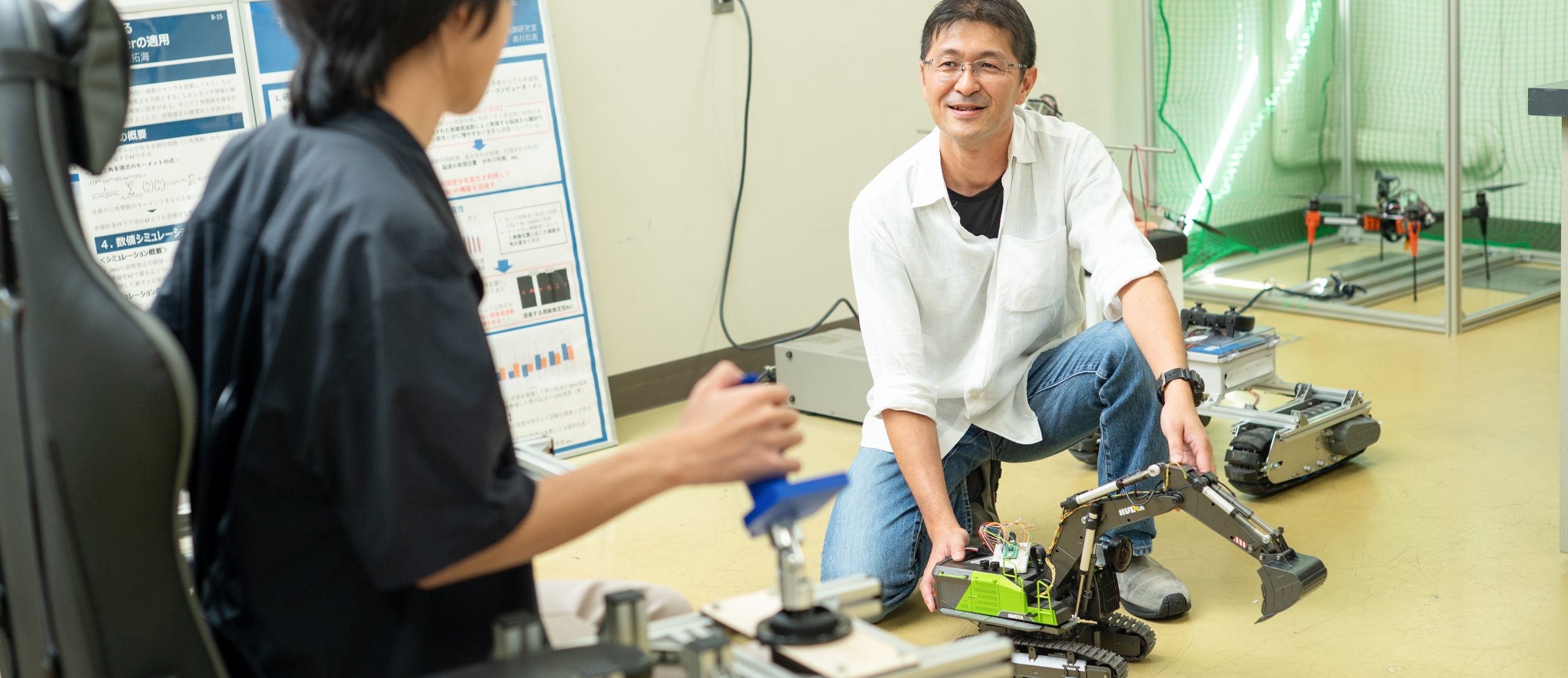

жҲ‘гҖ…гҒҜдәәгҒ«гҒЁгҒЈгҒҰж“ҚдҪңгҒ—гӮ„гҒҷгҒ„ж©ҹжў°гӮ·гӮ№гғҶгғ гӮ’ж§ӢзҜүгҒҷгӮӢгҒ“гҒЁгӮ’зӣ®зҡ„гҒ«гҖҒж©ҹжў°гӮ·гӮ№гғҶгғ гҒ®еҲ¶еҫЎжүӢжі•гӮ„ж“ҚдҪңж©ҹеҷЁгҒ§гҒӮгӮӢгӮӨгғігӮҝгғјгғ•гӮ§гӮӨгӮ№гҒ®жӨңиЁҺгғ»и©•дҫЎгӮ’иЎҢгҒЈгҒҰгҒ„гҒҫгҒҷгҖӮгҒқгҒ®дёҖгҒӨгҒЁгҒ—гҒҰгҖҒдәәгҒ®жҙ»еӢ•гҒ«иө·еӣ гҒҷгӮӢи„іжіўгӮ„зӯӢйӣ»дҪҚгҒӘгҒ©гҒ®з”ҹдҪ“дҝЎеҸ·гӮ’еҲ©з”ЁгҒҷгӮӢгҒ“гҒЁгҒ§дҪҝз”ЁиҖ…гҒ®ж„ҸеӣігӮ’жҺЁе®ҡгҒ—гҖҒиҮӘиә«гҒ®дҪ“гӮ’еӢ•гҒӢгҒҷгӮҲгҒҶгҒ«ж©ҹжў°гӮ’ж“ҚдҪңгҒҷгӮӢгӮ·гӮ№гғҶгғ гҒ®й–ӢзҷәгӮ’зӣ®жҢҮгҒ—гҒҰгҒ„гҒҫгҒҷгҖӮ
з§ҒгҒҹгҒЎгҒҜдәәгҒ«гҒЁгҒЈгҒҰж“ҚдҪңгҒ—гӮ„гҒҷгҒ„ж©ҹжў°гӮ·гӮ№гғҶгғ гӮ’ж§ӢзҜүгҒҷгӮӢгҒ“гҒЁгӮ’зӣ®зҡ„гҒ«гҖҒж©ҹжў°гӮ·гӮ№гғҶгғ гҒ®еҲ¶еҫЎж–№жі•гӮ„ж“ҚдҪңж©ҹеҷЁгҒ§гҒӮгӮӢгӮӨгғігӮҝгғјгғ•гӮ§гӮӨгӮ№гҒ®жӨңиЁҺгӮ’иЎҢгҒЈгҒҰгҒ„гҒҫгҒҷгҖӮ
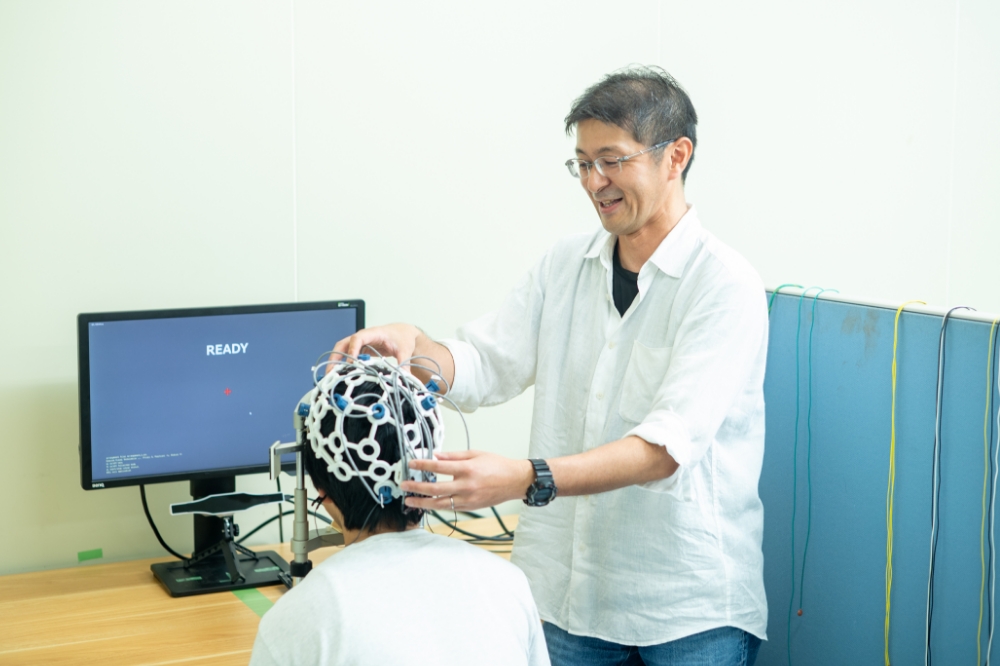
жң¬з ”究гҒ§гҒҜгҖҒи„іжіўи§ЈжһҗгҒ«гӮҲгӮӢгғ–гғ¬гӮӨгғігғ»гӮігғігғ”гғҘгғјгӮҝгғ»гӮӨгғігӮҝгғјгғ•гӮ§гғјгӮ№гӮ„гҖҒйҒӢеӢ•еҚҳдҪҚгҒ«еҹәгҒҘгҒҸзҫ©жүӢеҲ¶еҫЎжі•гҒ®й–ӢзҷәгӮ’йҖІгӮҒгҒҰгҒ„гҒҫгҒҷгҖӮгҒ“гӮҢгӮүгҒ®жҠҖиЎ“гҒҢзҷәеұ•гҒҷгӮӢгҒ“гҒЁгҒ«гӮҲгӮҠгҖҒиЈ…зқҖгҒҷгӮӢгҒ гҒ‘гҒ§иҮӘиә«гҒ®дҪ“гӮ’еӢ•гҒӢгҒҷгӮҲгҒҶгҒ«ж©ҹжў°гӮ’ж“ҚдҪңгҒҷгӮӢгӮҲгҒҶгҒӘгӮ·гӮ№гғҶгғ гӮ’дҪңгӮӢгҒ“гҒЁгҒҢеҸҜиғҪгҒ«гҒӘгӮӢгҒӢгӮӮгҒ—гӮҢгҒҫгҒӣгӮ“гҖӮ
и„іжіўгӮ„зӯӢйӣ»дҪҚгҒЁгҒ„гҒЈгҒҹз”ҹдҪ“жҙ»еӢ•гҒ«з”ұжқҘгҒҷгӮӢз”ҹдҪ“йӣ»дҪҚгӮ’еҲ©з”ЁгҒ—гҒҹгӮӨгғігӮҝгғјгғ•гӮ§гӮӨгӮ№гҒҜгҖҒеҫ“жқҘгҒ®жүӢгӮ’з”ЁгҒ„гӮӢгӮӨгғігӮҝгғјгғ•гӮ§гӮӨгӮ№гҒЁгҒҜз•°гҒӘгӮҠиә«дҪ“еӢ•дҪңгӮ’дјҙгӮҸгҒҡгҒ«ж©ҹеҷЁгӮ’ж“ҚдҪңгҒ§гҒҚгӮӢгҒ“гҒЁгҒӢгӮүгҖҒзҰҸзҘүж©ҹеҷЁгҒёгҒ®еҝңз”ЁгҒ®гҒҝгҒӘгӮүгҒҡгҖҒеҫ“жқҘгҒ®гӮігғігғҲгғӯгғјгғ©гҒ®ж©ҹиғҪжӢЎејөгҒӘгҒ©гҒ•гҒҫгҒ–гҒҫгҒӘеҝңз”ЁгҒҢжңҹеҫ…гҒ•гӮҢгҒҰгҒ„гҒҫгҒҷгҖӮзү№гҒ«иҝ‘е№ҙгҒ§гҒҜз°Ўжҳ“зҡ„гҒ«з”ҹдҪ“дҝЎеҸ·гӮ’иЁҲжё¬гҒ§гҒҚгӮӢе®үдҫЎгҒӘгғҮгғҗгӮӨгӮ№гҒ®й–ӢзҷәгӮ„гҒ“гӮҢгҒҫгҒ§иЁҲжё¬гҒҢеӣ°йӣЈгҒ§гҒӮгҒЈгҒҹдҝЎеҸ·гҒ®жҺЁе®ҡжүӢжі•гҒҢзўәз«ӢгҒ•гӮҢгӮӢгҒӘгҒ©гҖҒз”ҹдҪ“дҝЎеҸ·гӮӨгғігӮҝгғјгғ•гӮ§гӮӨгӮ№гӮ’е®ҹз”ЁеҢ–гҒҷгӮӢз’°еўғгҒҢж•ҙгҒ„гҒӨгҒӨгҒӮгӮҠгҒҫгҒҷгҖӮгҒ“гҒ®гӮҲгҒҶгҒӘзҠ¶жіҒгӮ’иғҢжҷҜгҒЁгҒ—гҒҰгҖҒжҲ‘гҖ…гҒҜж–°гҒҹгҒӘи„іжіўи§Јжһҗжі•гӮ’з”ЁгҒ„гҒҹгғ–гғ¬гӮӨгғігғ»гӮігғігғ”гғҘгғјгӮҝгғ»гӮӨгғігӮҝгғјгғ•гӮ§гғјгӮ№гҒ®жӨңиЁҺгӮ„гҖҒзӯӢгҒ®еҸҺзё®жҢҮд»ӨдҝЎеҸ·гҒ§гҒӮгӮӢйҒӢеӢ•еҚҳдҪҚгҒ«еҹәгҒҘгҒҸзҫ©жүӢеҲ¶еҫЎжі•гҒӘгҒ©гӮ’жӨңиЁҺгҒ—гҒҰгҒ„гҒҫгҒҷгҖӮ
и„іжіўеҲ©з”ЁгӮӨгғігӮҝгғјгғ•гӮ§гғјгӮ№гҒ§гҒҜпјҢдёҖе®ҡе‘ЁжңҹгҒ§зӮ№ж»…гҒҷгӮӢиҰ–иҰҡеҲәжҝҖгӮ’жіЁиҰ–гҒ—гҒҹйҡӣгҒ«зҷәзҸҫгҒҷгӮӢи„іжіўпјҲе®ҡеёёзҠ¶ж…ӢиҰ–иҰҡиӘҳзҷәйӣ»дҪҚпјүгӮ’еҲ©з”ЁгҒ—гҒҹж–°гҒ—гҒ„гӮӨгғігӮҝгғјгғ•гӮ§гғјгӮ№гӮ’жҸҗжЎҲгҒ—гҒҰгҒ„гҒҫгҒҷгҖӮжҲ‘гҖ…гҒ®жүӢжі•гҒ§гҒҜиҰ–иҰҡеҲәжҝҖгғ‘гӮҝгғјгғігҒ«еҜҫгҒҷгӮӢжіЁиҰ–зӮ№дҪҚзҪ®гӮ’еӨүеҢ–гҒ•гҒӣгҒҹйҡӣгҒ«з”ҹгҒҳгӮӢи„іжіўгҒ®еј·еәҰеҲҶеёғгҒ®еӨүеҢ–гӮ’еҲ©з”ЁгҒҷгӮӢгҒ“гҒЁгҒ§гҖҒеҚҳдёҖе‘Ёжіўж•°гҒ®иҰ–иҰҡеҲәжҝҖжҷӮгҒ®и„іжіўгҒӢгӮүжіЁиҰ–дҪҚзҪ®гҒ®иӯҳеҲҘгғ»жҺЁе®ҡгӮ’иЎҢгҒ„гҒҫгҒҷгҖӮгҒ“гӮҢгҒ«гӮҲгӮҠпјҢи„іжіўгҒӢгӮүгҒ©гҒ“гӮ’жіЁиҰ–гҒ—гҒҰгҒ„гӮӢгҒ®гҒӢгӮ’жҺЁе®ҡгҒҷгӮӢгӮӨгғігӮҝгғјгғ•гӮ§гғјгӮ№гҒ®и§ЈеғҸеәҰгӮ’еӨ§е№…гҒ«еҗ‘дёҠгҒ•гҒӣгӮӢгҒ“гҒЁгҒҢгҒ§гҒҚгӮӢеҸҜиғҪжҖ§гҒҢгҒӮгӮҠгҒҫгҒҷгҖӮгҒҫгҒҹпјҢзҫ©жүӢеҲ¶еҫЎжі•гҒ®з ”究гҒ§гҒҜгҖҒиҝ‘е№ҙзўәз«ӢгҒ•гӮҢгҒҹеӨҡзӮ№иЁҲжё¬гҒ—гҒҹзӯӢйӣ»дҪҚгҒӢгӮүзӯӢз№Ҡз¶ӯгҒёгҒ®еҸҺзё®жҢҮд»ӨдҝЎеҸ·гҒ§гҒӮгӮӢйҒӢеӢ•еҚҳдҪҚгӮ’жҺЁе®ҡгҒҷгӮӢжүӢжі•гӮ’е°Һе…ҘгҒ—гҖҒйҒӢеӢ•еҚҳдҪҚгҒ«еҹәгҒҘгҒҸж–°гҒ—гҒ„еӢ•дҪңзҠ¶ж…ӢжҺЁе®ҡжі•гҒЁгҒ“гӮҢгҒ«гӮҲгӮӢзҫ©жүӢеҲ¶еҫЎжі•гҒ®зўәз«ӢгӮ’зӣ®жҢҮгҒ—гҒҰгҒ„гҒҫгҒҷгҖӮ

е…·дҪ“зҡ„гҒ«гҒҜгҖҒд»ҘдёӢгҒ®гӮҲгҒҶгҒӘеҝңз”ЁгҒ«зөҗгҒігҒӨгҒ‘гӮӢгҒ“гҒЁгҒҢжңҹеҫ…гҒ§гҒҚгҒҫгҒҷгҖӮ
гғ»и„іжіўгӮ’еҲ©з”ЁгҒ—гҒҹйқһжҺҘи§ҰгғЎгғӢгғҘгғјйҒёжҠһгӮӨгғігӮҝгғјгғ•гӮ§гӮӨгӮ№гҖҒгҒҠгӮҲгҒіиҰ–з·ҡиҝҪи·ЎгӮ·гӮ№гғҶгғ
гғ»зӯӢгҒҢж®ӢеӯҳгҒ—гҒҰгҒ„гҒӘгҒҸгҒҰгӮӮеҲ¶еҫЎеҸҜиғҪгҒӘиғҪеӢ•зҫ©жүӢ
гғ»з”ҹдҪ“дҝЎеҸ·гӮ’еҲ©з”ЁгҒ—гҒҹж—ўеӯҳгӮӨгғігӮҝгғјгғ•гӮ§гӮӨгӮ№гҒ®ж©ҹиғҪжӢЎејөгғ»й«ҳзІҫеәҰеҢ–
| з ”з©¶жғ…е ұ | |
|---|---|
| гӮёгғЈгғјгғҠгғ« | жҠ•зЁҝдәҲе®ҡ |
е…өеә«зңҢз«ӢеӨ§еӯҰе·ҘеӯҰз ”з©¶з§‘гҒҢжҸҗдҫӣгҒ§гҒҚгӮӢжңҖе…Ҳз«ҜгҒ®з ”究жҲҗжһңгғ»й«ҳеәҰгҒӘжҠҖиЎ“гғӘгӮҪгғјгӮ№пјҸгғҺгӮҰгғҸгӮҰгҒӘгҒ©гӮ’гҒ”зҙ№д»ӢгҒ—гҒҫгҒҷгҖӮе…ұеҗҢз ”з©¶гӮ„еҸ—иЁ—з ”з©¶гӮ„жҠҖиЎ“зӣёи«ҮгҒӘгҒ©гӮ’йҖҡгҒҳгҒҰгҖҒж–°гҒ—гҒ„гӮўгӮӨгғҮгӮўгӮ„жҠҖиЎ“гӮ’е…ұгҒ«з”ҹгҒҝеҮәгҒ—гҖҒжңӘжқҘгӮ’е…ұеүөгҒҷгӮӢгғ‘гғјгғҲгғҠгғјгӮ’гҒҠеҫ…гҒЎгҒ—гҒҰгҒҠгӮҠгҒҫгҒҷгҖӮ
дёҖиҰ§гӮ’иҰӢгӮӢ