乱数を用いてものの動きをデザインするアルゴリズム
学べる内容・身に付くスキル
アルゴリズムの設計・実装を通して、最適化技術や制御系の設計・解析手法について学べます。システム論的見地からアルゴリズムを理解することができます。
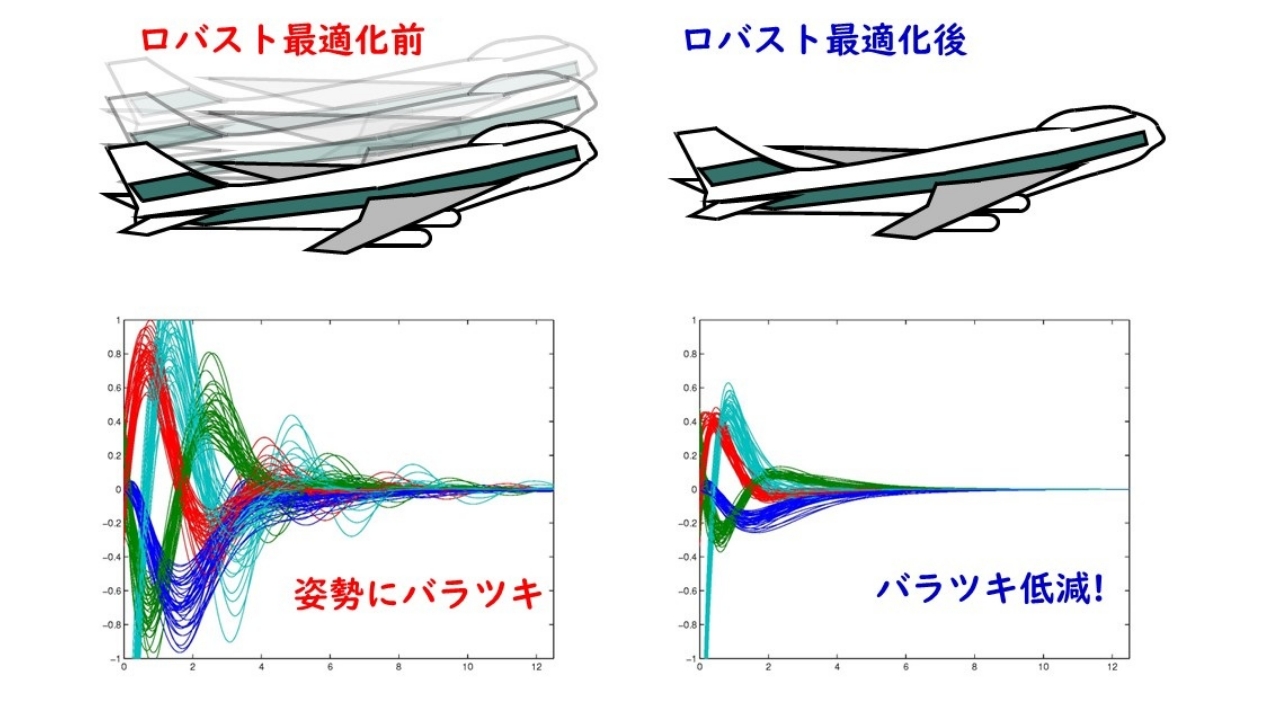
ものの動きのデザインを不確定な状況で行うためのアルゴリズムを研究しています。ものの動きを予測するために用いるモデルが不正確な場合、その誤差も考慮して最悪ケースでも暴走しないようにデザインする必要があります。考慮しなければならない状況は無数に存在するため、数値的に設計を行うことは困難ですが、それに対処するため、乱数を用いて有限個の状況について設計を行うことを提案しています。計算負荷と得られる解の精度のバランスをとりつつ、頑健性をもった動きをデザインすることが可能です。
マルチエージェント系の協調・非協調制御
学べる内容・身に付くスキル
多数の意思決定主体が存在する状況下での制御を考えることで、基本的な制御手法だけでなく、ゲーム理論などを用いて個々の行動が他者に影響を与える状況を解析できるようになります。
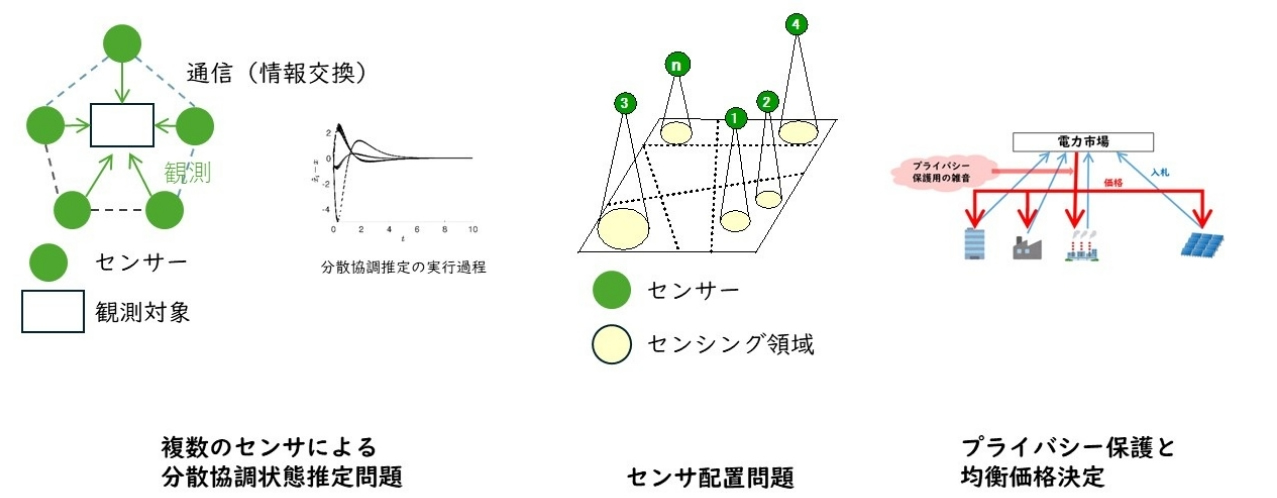
多数の自律したエージェントが存在する状況下での制御問題を研究しています。多数のエージェントは互いに干渉し合うため、どのように協力すれば、状態推定など大きなタスクを実行可能か、また協力して広大な領域をセンシングさせるためには個々のエージェントにどのような評価関数を設計すれば良いかであったり,そのような中で機微な情報を守るにはどうすればよいかを考えています。様々なものがネットワークに接続され、情報交換を通じて個々の能力以上のものを発揮しており、そのような社会をより発展させることに貢献できます。





