
川口 夏樹Natsuki Kawaguchi
助教|博士(工学)
[mail] kawaguchi@eng.u-hyogo.ac.jp
機械・材料工学科 機械工学コース
機械工学専攻 制御システム研究室
制御工学や計測工学の分野では,実際の物理量を抽象化した信号の流れを取り扱うことが多く,数式モデルを使って講義が進みます。こうした数式モデルと実現象を結びつけるため,実験や演習を通して理解を実感できるように努めます。





制御工学や計測工学の分野では,実際の物理量を抽象化した信号の流れを取り扱うことが多く,数式モデルを使って講義が進みます。こうした数式モデルと実現象を結びつけるため,実験や演習を通して理解を実感できるように努めます。
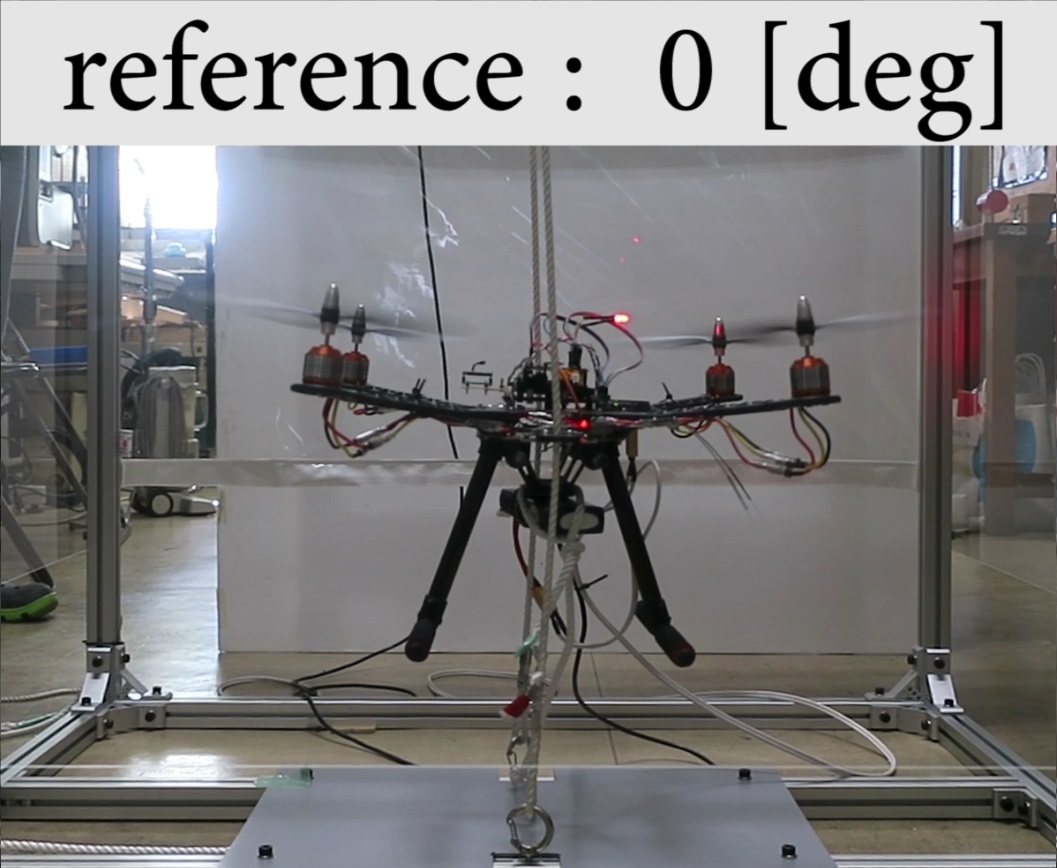
ドローンの制御の目的に合わせて冗長なロータを活用する制御手法を考えることで,数理モデルや実機を使った工学的な問題把握の考え方を学べます。
4つを超える冗長なロータを持つヘキサロータドローンなどを対象に,冗長駆動系における付加価値の高い制御系設計について研究しています。冗長なロータの組み合わせ方法を工夫することで,効率が良い制御や,効率は悪いけれど安全な制御を選択的に実現できると考えています。現在は,様々なニーズをもとに,ドローンのみでなく電気自動車など多くの新しいシステムにおいて冗長駆動系が増えています。この研究は,こうした冗長駆動される新しい機械-電気システムや,高い付加価値を持つモノづくりに活かすことを目指しています。
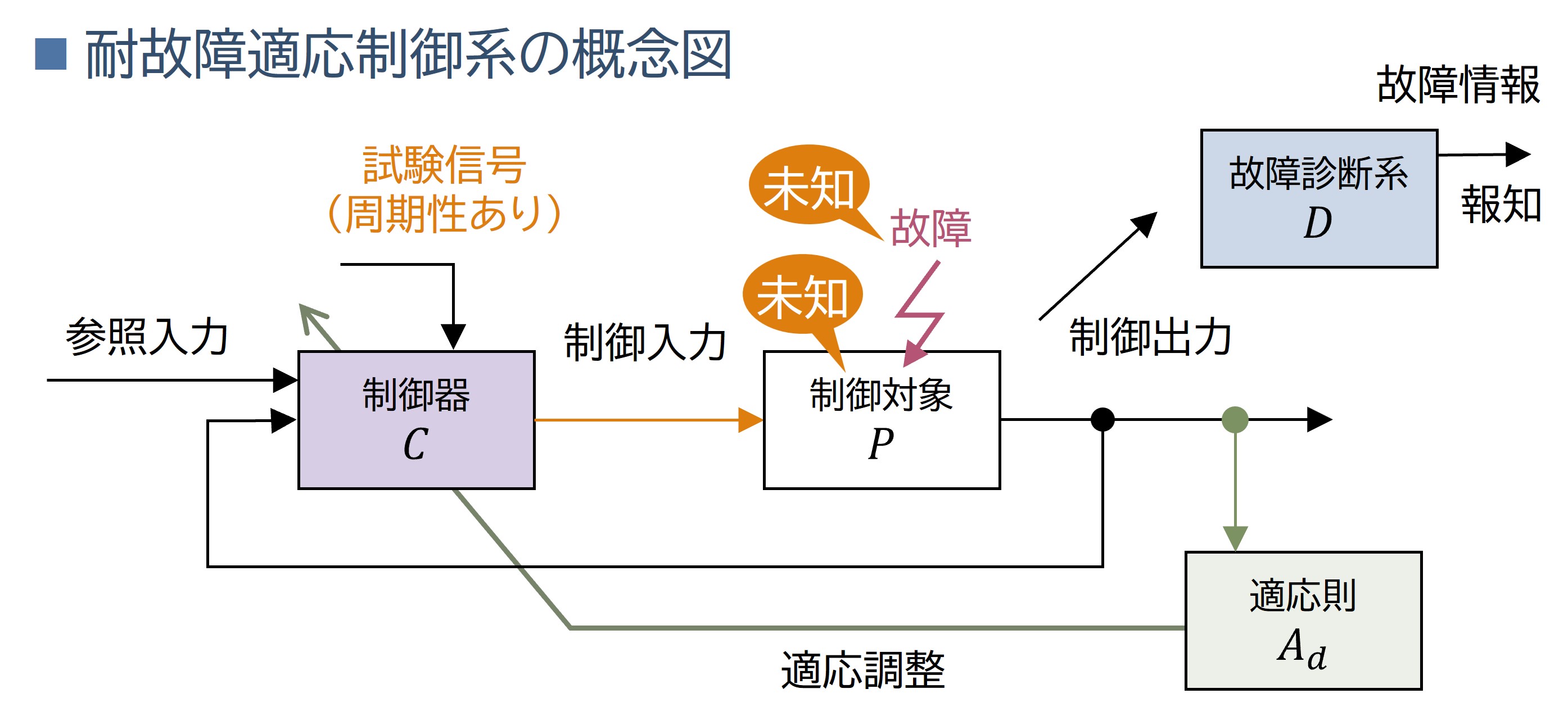
観測可能な利用できる信号から故障診断を行ったり,耐故障性を持つ制御手法について考えることで,理論展開をはじめ,コンピュータを使った数値シミュレーションや実際の信号処理・解析手法について学べます。
制御入力のほかに制御対象に積極的に信号を加えて,対象内部をより詳しく調べるアクティブ故障診断手法や,故障時にも安全な動作状態を維持する耐故障制御について研究しています。とくに,外部の環境や対象の故障状態に「適応」して望ましい制御動作を維持できる適応制御に着目した研究を行っています。この研究は,故障する可能性を0にすることのできない実際の機械-電気システムにおいて,安全とはどういう状態か,どうすれば安全性を高められるかを考え,その実現に寄与することを目指しています。