角田 祐輔Yusuke Tsunoda
助教|博士(工学)
[mail] tsunoda@eng.u-hyogo.ac.jp
機械・材料工学科 機械工学コース
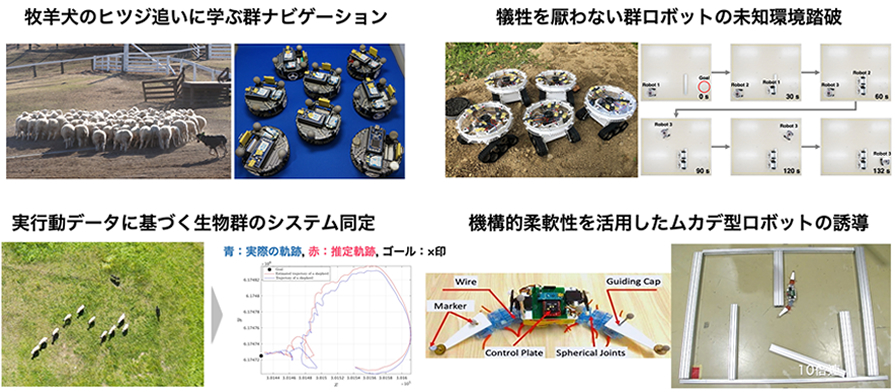
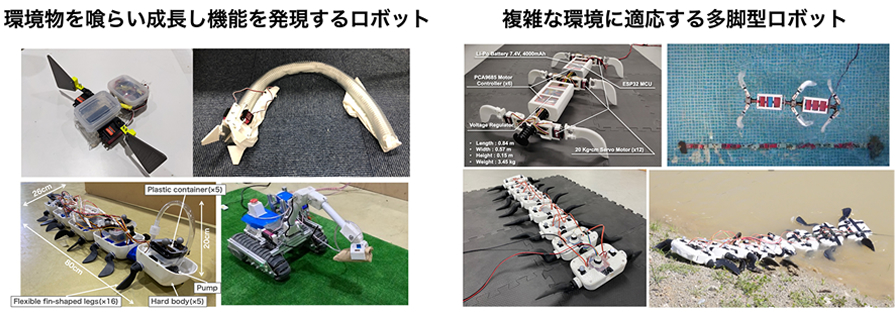
工学研究科 機械工学専攻 フィールドスワームロボティクス研究室




制御工学に基づく制御理論と実験検証を重んじ,その両方を通して制御の面白さを伝えられるようなわかりやすい指導を心がけています.研究では主に,生物模倣ロボットや群ロボットシステム,群知能,災害対応ロボット,不整地移動ロボットの開発を行なっており,これらの研究がフィールドスワームロボティクス研究室という研究室の名前の由来になっています.角田研究室で世界で君だけのロボットを作りませんか?