研究内容紹介
現在の研究内容
BMI (Brain-Machine Interface) に基づくリハビリテーションシステムの開発
これまで,脳卒中や脊髄損傷後における麻痺は,リハビリテーションによる回復は難しいとされてきました.しかしながら,近年,患者さんが麻痺した体を動かそうとする意図に応じた動作や刺激を患部に与えることによって,回復できる可能性が報告されています.
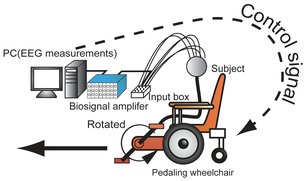
そこで本研究室は,東京大学大学院 情報理工学系研究科 満渕研究室と共同で,下肢が麻痺してしまった患者さんを対象とした,左図に示すようなリハビリテーション装置の研究開発を行っています. 特に,麻痺が重く患部から信号が取れない患者さんを対象としているため,患者さんが患部を動作させようとしているかどうかを脳の働きから判断する手法の一つである,脳波を利用した動作意図推定の研究を行っています.
現在,右図写真のように健常な人が実際に足漕ぎを行った際の脳波を元に動作または停止の2値判別を行い,リハビリテーション装置の試作機をリアルタイム動作させることができています.

生体信号に基づいた関節角度推定型ロボット義手の開発
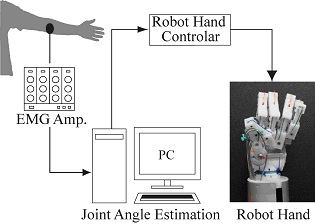
事故や疾病により手を失った患者のために,自由に動かせる義手の開発を目指しています.人が体を動作させる際には筋電位と呼ばれる電位が生じ,この電位を皮膚表面で計測したものを表面筋電信号といいます.この筋電位は,体の動作と密接に関係しているため,これを用いて患者が行おうとしている動作を推定することが可能となります.
本研究では現在,表面筋電信号を用いて指関節の角度を推定する手法を提案しています.また,推定した角度に基づいてロボットハンドを制御することで,意図した動作をロボットハンドで再現できることを確認しています.
その他の研究内容
- 搬送物質量推定法の開発
- Passive velocity field control を用いた上肢リハビリロボットの制御
- 三軸加速度センサを用いた室内における高齢者の転倒アルゴリズムの開発
- 打鍵付随情報を用いたキーボードの知能化に関する研究
- トレーラトラックの自動駐車に向けた研究
- 釣り糸を用いた人工筋肉の開発
過去の主な研究内容
- Acrobotの振り上げ倒立制御に関する研究
- トライボロジ,摩擦現象に関する研究
- マイクロ波センサアレイによる室内での移動物体位置推定法
- 磁気浮上系における位置制御および非線形振動解析
- ビジュアルサーボを適用したアームロボットによる移動物体追従に関する研究
- 鏡面加工が施された金属表面上の欠陥検出法の開発
- パラメトリックスピーカを用いた騒音低減システムの構築
- 複数光源下での色恒常性に関する研究
- 画像計測による表面性状評価装置の開発
- ロボットの自己位置推定に関する研究
- ベイジアンフィルタによる手書き文字認識手法
- コウノトリの野生馴化支援ロボットの開発