人工関節を用いて手術中に関節反力を計測する研究

人工関節への置換手術中に関節にかかる力(関節反力)を計測することにより,関節周囲の軟部組織の張力を可視化する装置の開発を行う研究です.
本研究室では,以前から人工関節を用いて関節反力を計測する装置の開発に関する研究を行ってきました.
主に股関節と肩関節について行っており,現在はリバース型の人工肩関節を中心に人工股関節についても研究を行っております.
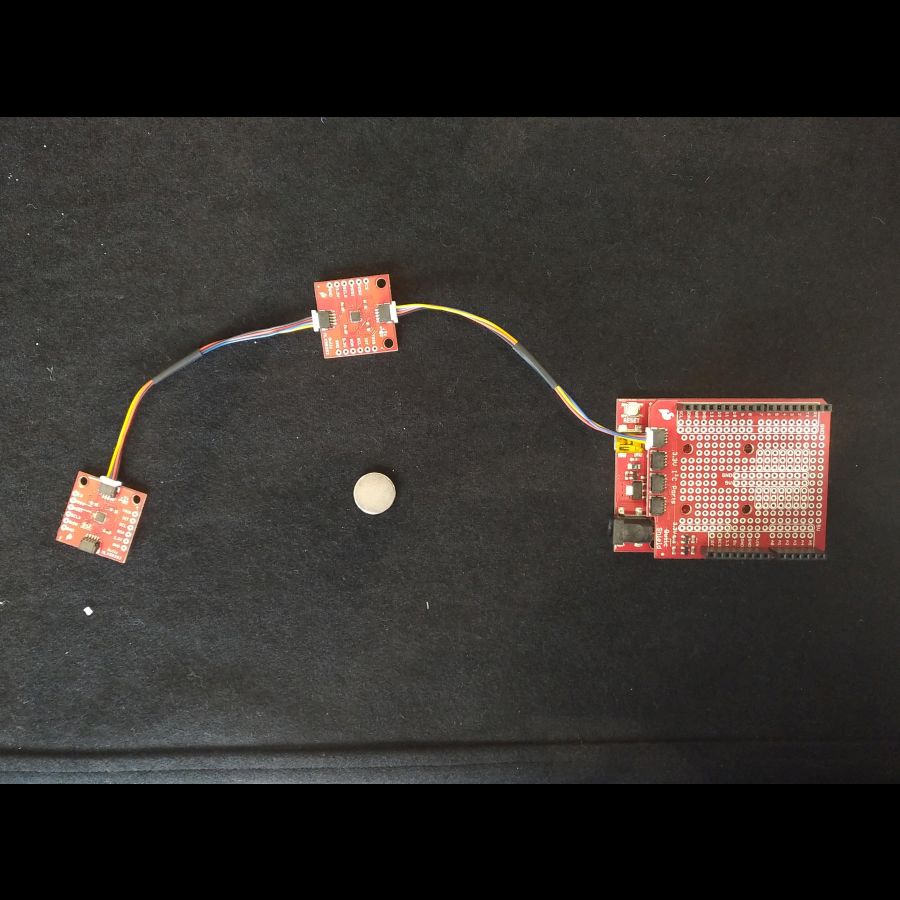
実際の手術現場での使用を目標に,装置の設計・製作,力の計測を行っています.右の写真は,リバース型の人工肩関節に関節反力計測装置を埋め込んだところです.
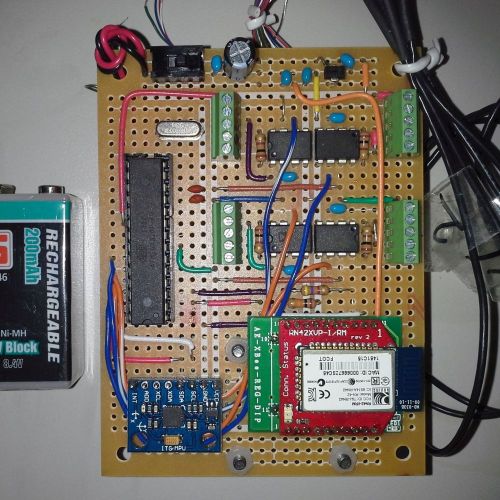
上腕骨にかかる力を計測する構造となっており,ケーブルを通してデータの転送を行います.
なお人工肩関節と人工股関節はそれぞれ神戸大学整形外科および旭川医科大学整形外科と共同で研究を行っています.
筋骨格コンピュータモデルによる筋活動度推定

筋力トレーニングの動作中における個々の筋力をコンピュータシミュレーションにより求める研究を行っています.
モーションキャプチャシステムを用いて動作を取得し,筋骨格コンピュータモデル(OpenSim)と数値計算ソフト(MATLAB)を用いて筋力の計算を行います.
モーションキャプチャシステムとは,複数台の赤外線カメラを用いて,身体に貼り付けた反射マーカーの3次元位置を取得し,動作を求めるシステムです.
現在は下肢筋群に限定し膝関節屈曲運動を行っており,特に共収縮の度合いに焦点を当てて研究を行っております.
今後は計算精度向上を目標に実験条件や被験者の追加を行う予定です.
前十字靭帯再建術中に再建靭帯の張力を測定する研究
前十字靭帯再建術中に再建靭帯の張力を測定し,リアルタイムにて可視化する装置の開発を目指しています.
手術中に再建靭帯の張力を可視化する装置についての報告はありません.
しかし,適切な張力にて靭帯を再建することは,術後の成績に影響があるため重要です.
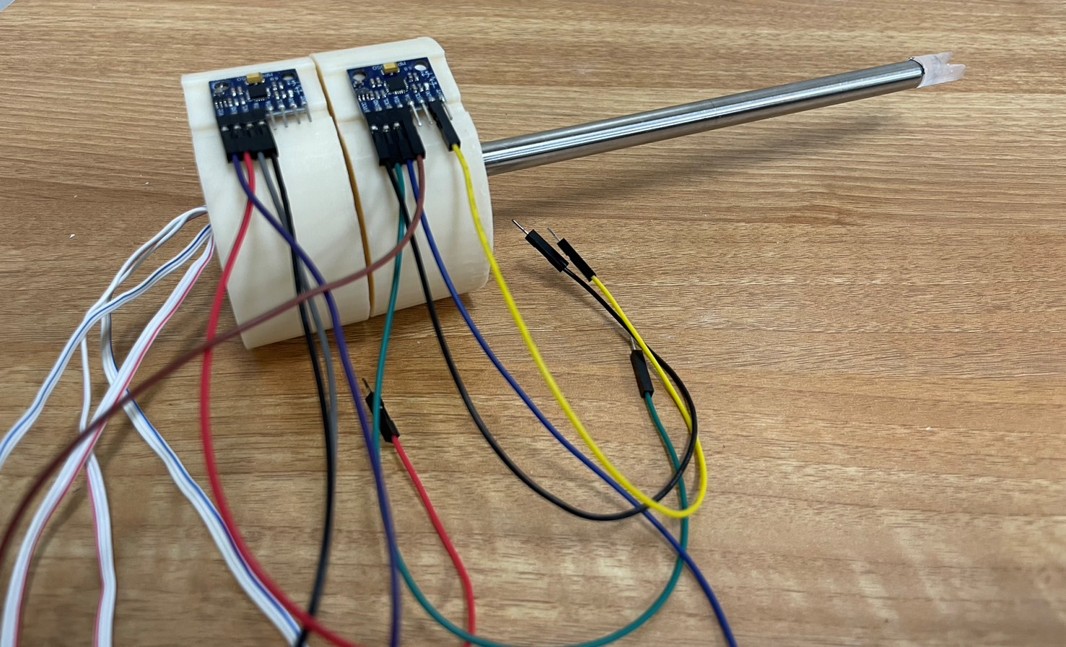
そこで前十字靭帯再建術中に使用可能な張力測定機器の研究を行っており,手術現場にて測定することを目標に,装置の設計製作を行っています.
なお本研究は,獨協医科大学埼玉医療センターと共同で研究を行っています.
膝関節の軟骨に関する研究
膝離断性骨軟骨炎(Osteochondritis dissecans: OCD)という若年者における原因不明の軟骨下骨の局所病変があります.
これは軟骨下骨が分離する疾患であり,変形性膝関節症へとつながる可能性があります.
発生原因については諸説ありますが,骨の形態の違いによって軟骨部にせん断応力が加わることが有力な要因であると考えられています.
しかし,骨形態の違いが軟骨部へ与える力学的特徴を詳細に検討した研究はありません.
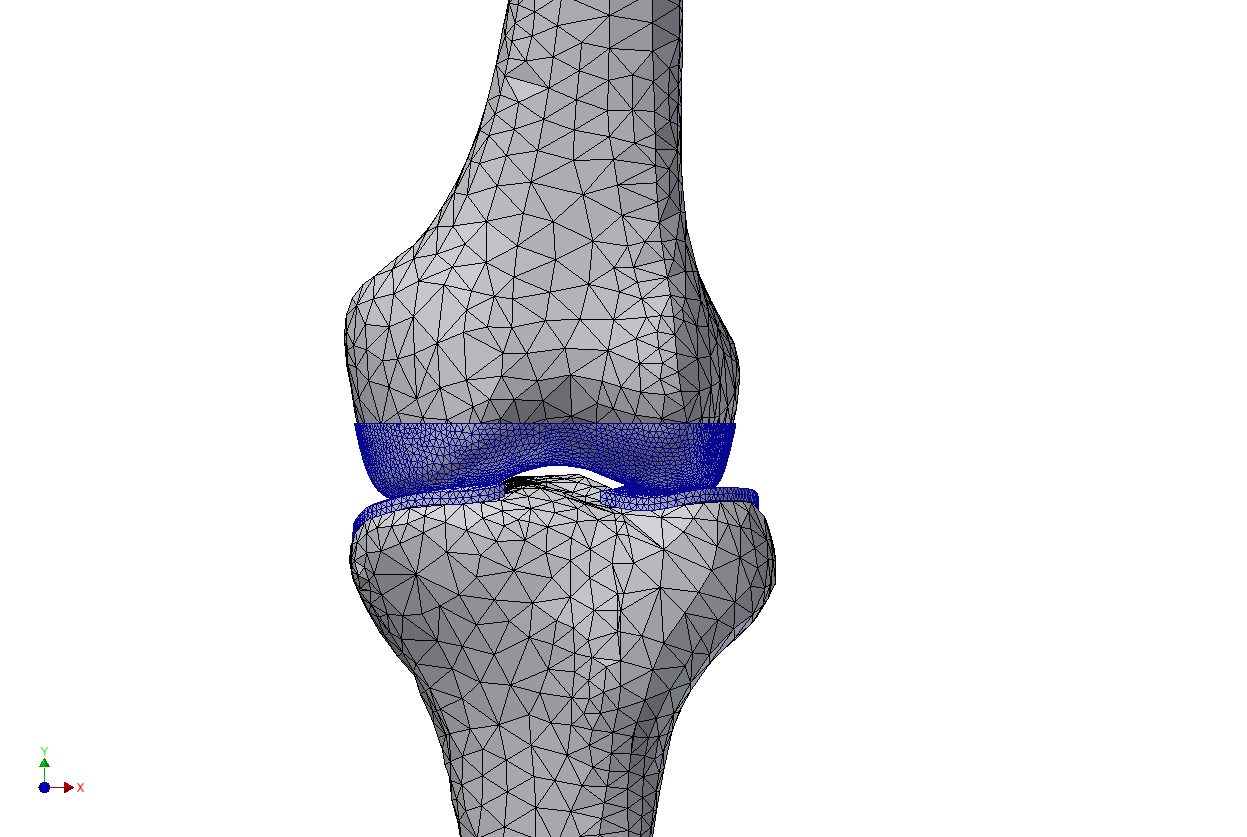
本研究では3次元CAD(Computer Aided Design)を用いて,骨形態の違いによりせん断応力などの力学的要因がOCDの発生原因であることの解明を目指して研究を行います.
本研究は,兵庫医科大学整形外科と共同で研究を行っています.
膝蓋骨骨折の手術方法に関する研究
膝蓋骨が骨折した際の手術法として,ひまわり法があります.
ひまわり法は従来の手術法よりも固定力が優れていると言われていますが,それを力学的に証明するため研究を行っております.
本研究では実際の骨モデルを用いた実験とコンピュータシミュレーションによる解析を用いて,ひまわり法の有効性を示すことを目的としています.
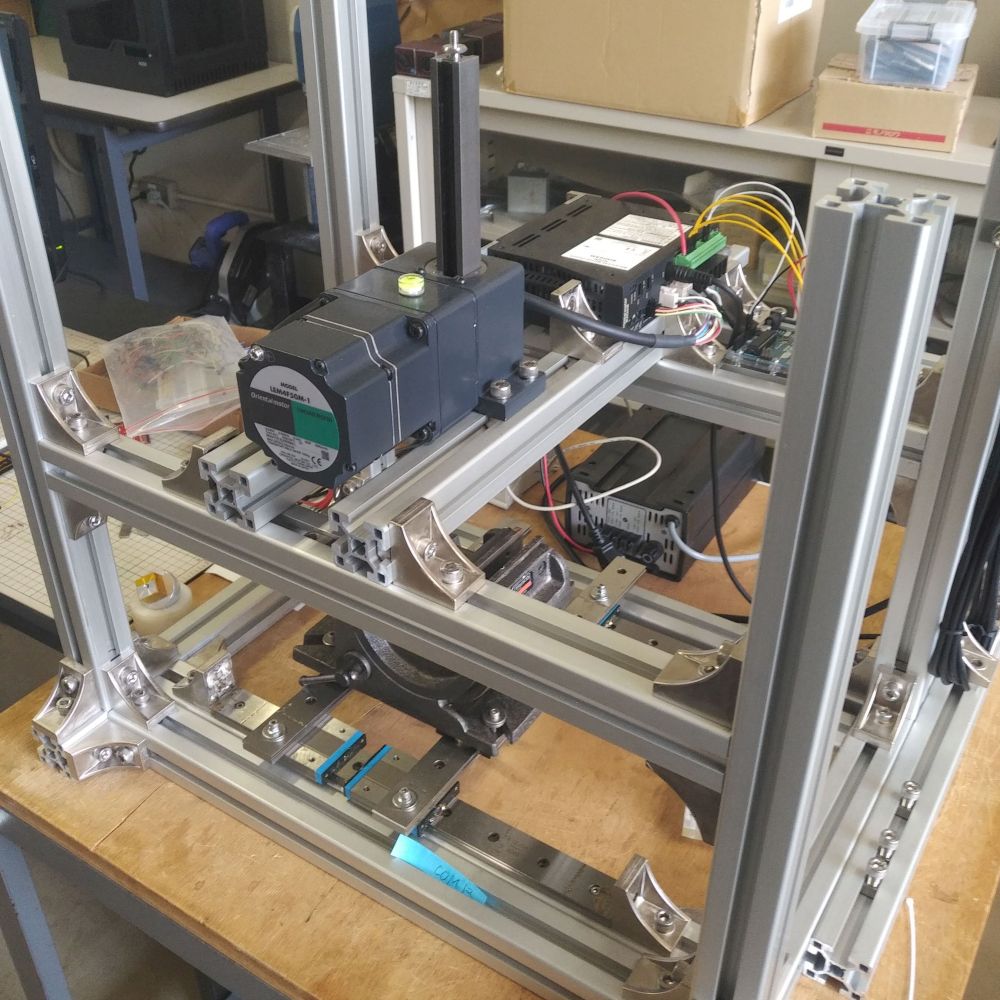
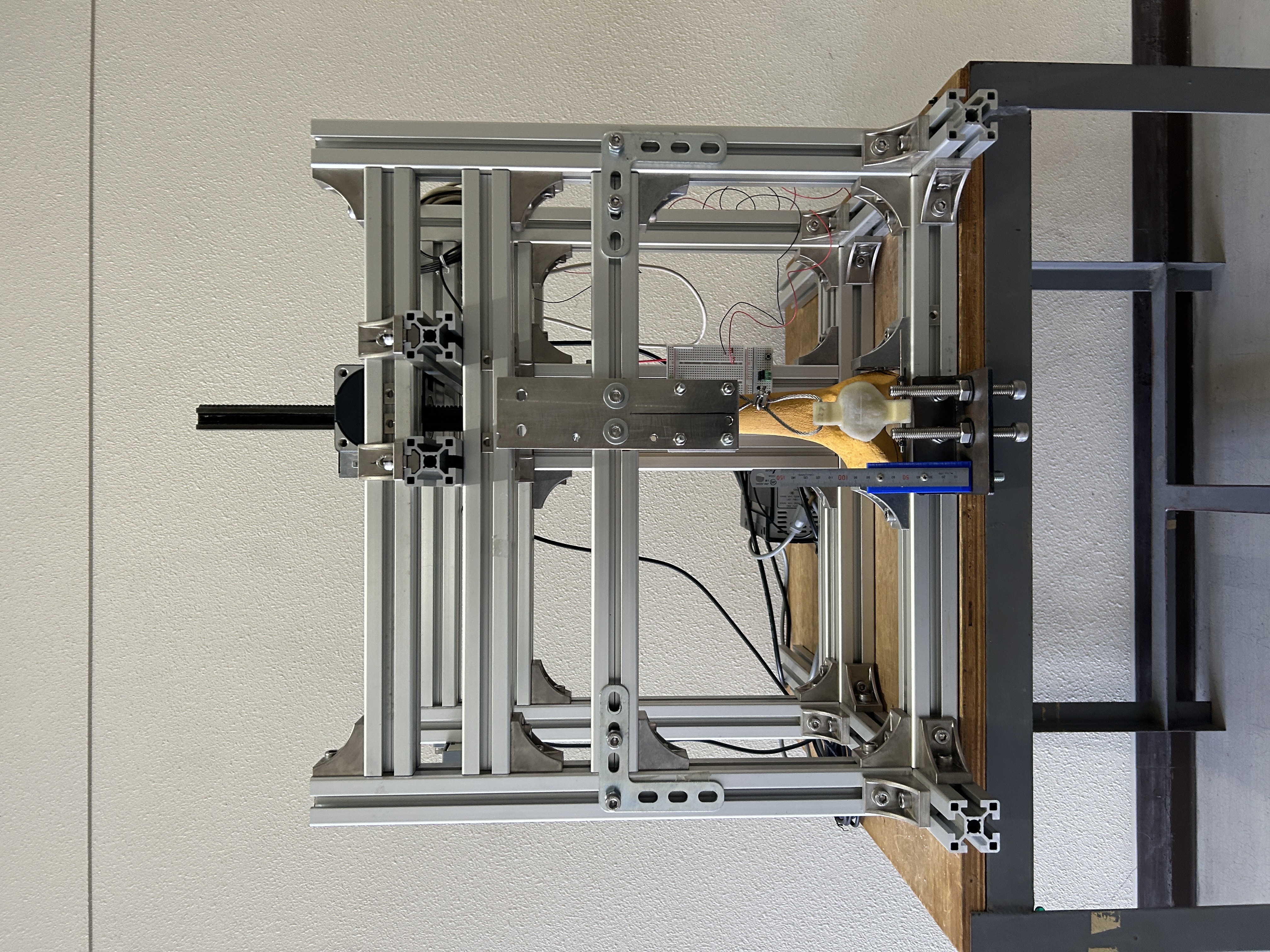
実験では図のような実験装置で膝関節を再現し,膝蓋骨に大腿四頭筋張力に相当する引張り力をかけ骨折線の変位を比較しています.
解析では3次元CAD(Computer Aided Design)を使用し,膝蓋骨モデルを作製したのち,様々な条件で応力や変位の比較を行っています.
本研究は,兵庫県立はりま姫路総合医療センター整形外科と共同で研究を行っております.
脚長差が歩行に与える影響の研究

一般的に脚長差が3cm未満であれば,脚長補正を行う必要はないと言われており,補正手術は自己判断となります.そのためほとんどの人は脚長補正を行わずに生活しています.
しかし,脚長補正をしない状態でいると過剰な代償動作が生じ,腰痛や関節の炎症を伴う可能性があります.
本研究では3次元モーションキャプチャシステムを用いて,脚長補正する前と後の歩容変化を定量的に明らかにするとともに,脚長補正によりどの程度歩容の左右差が改善できるのかを解析します.
また,筋骨格シミュレーションソフト(OpenSim)によりパソコン内にて歩行動作を再現し,脚長補正の前後で,下肢関節にどのような影響を与えるのかを力学的に計算することを目的としています.
筋骨格コンピュータモデルを用いて関節反力を計算する研究
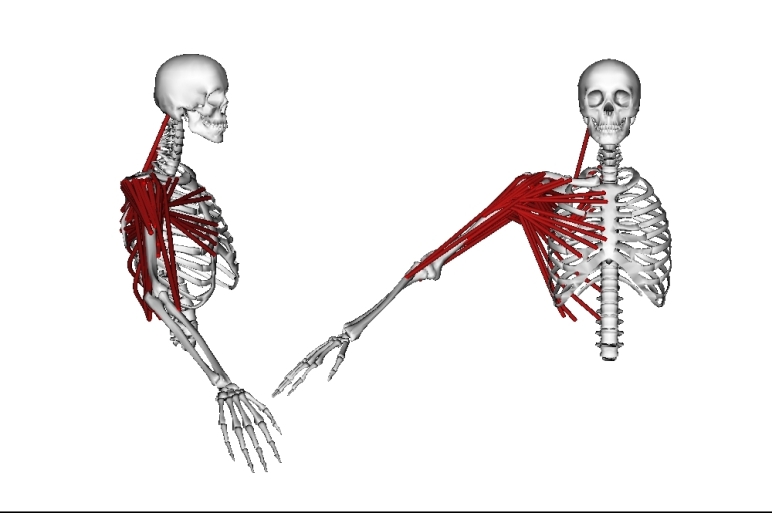
人工関節の手術中に関節反力を計測する研究とリンクしています.筋骨格コンピュータモデルに人工関節を埋めるシミュレーションを行い,関節反力を計算により求めます.
右の写真の肩関節には,見えにくいですが人工肩関節が埋め込んであります.手術中をシミュレートすることにより計測装置の設計に使用するとともに,実際に計測した値の検証として使用できます.
さらに手術後の運動時の関節反力を求めることにより,日常生活において人工関節が受ける力を求めることが可能となります.この計測は現在は非常に難しい計測となっているためシミュレーションで正確に求めることに意味があります.
膝周囲骨切り術に関する研究
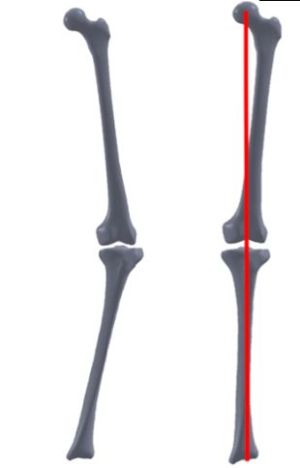
過度の内反膝(O脚)により,歩行時に膝内反モーメントが増大し膝内側顆に偏った荷重が負荷されることがあります.
偏った荷重は変形性膝関節症の進行要因となりうるため,膝周囲骨切り術が施されます.
この膝周囲骨切り術の更なる臨床成績向上をめざして,術後に起こりうる体内での力学環境の解明を目指して研究を行っています.
実際の手術手技に基づいた関節モデルをコンピュータ内にて再現し,有限要素法(Finite Element Method),3次元CAD(Computer Aided Design) 筋骨格シミュレーションソフト(Opensim)などを用いて研究を行います.
本研究はジョンソン・エンド・ジョンソン株式会社メディカルカンパニーからの研究支援金によりサポートされています.
歩行時の関節トルクを求める研究

3次元モーションキャプチャシステムを用いて歩行動作をデジタル化し,筋骨格シミュレーションソフト(OpenSim)によりパソコン内にて歩行動作を再現します.
物体の運動は,高校物理で勉強するニュートンの運動方程式(運動の第2法則) F=ma に従います.
回転運動については,大学1年で勉強する剛体の回転運動の運動方程式に従い,これらの方程式はそれぞれ時間で積分することにより,速度や位置が理論的に求まります.
これは人体の運動についても同様で,筋力により関節トルクが発生し関節運動が起こるため,筋力がわかれば運動が記述でき,逆に運動から筋力を逆算することも可能です.
後者を逆動力学 (Inverse Dynamics) と言い,この研究分野ではこちらが主に用いられます.筋力を求めることは理論的に難しいためです.
これらの手法を用いて,細かな動作の修正や骨格の違いが,下肢関節にどのような影響を与えるかを力学的に計算することを目的としています.